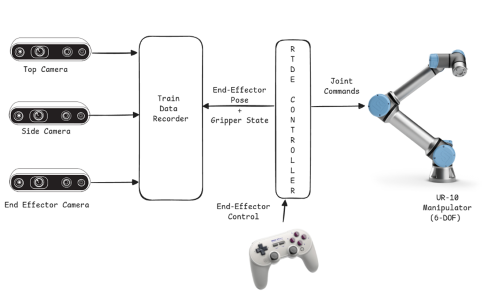
This project focuses on teaching robots to perform insertion tasks through imitation learning techniques. By using inverse reinforcement learning, we enable robots to learn from human demonstrations and replicate precise insertion movements. image Share on Twitter Facebook LinkedIn Previous Next

{kind=link}